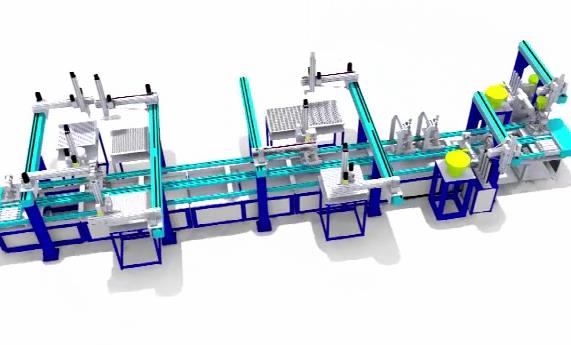
機床上下料機械手是用於數控機床自動化上下(xià)料的直角坐標機器人機械手,數控機床桁架式
自動上下料機械手是工業應用中,能夠實現自動控製的、可重複編程、多功能、多自由度、運動自(zì)由度間成空間(jiān)直角關係(xì)的(de)自動化設備。桁架式機床上下料機器人與數控機床相結(jié)合,可以實現所有工藝過程的工件自動抓取、上料、下料、裝卡、工件(jiàn)移位翻轉、工件轉序加工等,能夠(gòu)極大的節約人工成(chéng)本,提(tí)高生產效率。
1、工件輸送
采用水平(píng)輸送、傾斜(xié)輸送、提升輸送等方式。水平輸送可輸(shū)送不同物品,並且(qiě)可以采用不同(tóng)輸送速度、不同輸送形式;傾斜輸送可調節傾斜角度,通過使用帶有花紋的傳輸帶或水平擋板,提高傳輸帶對工(gōng)件的(de)抓著穩定性,防止工件滑散、甩脫,保證準確的運行軌跡;提升(shēng)輸送占據空(kōng)間小,對小型圓柱類零件有較好效果。
在PLC程序設計時,如所需加(jiā)工的(de)工件有方向性,編輯的PLC程序除控製工(gōng)件(jiàn)的轉向定位,還應考(kǎo)慮到定位的可靠性。在一次定位不準時,可以(yǐ)重新轉向定位一到兩次,以保證循環中不會因工件輸送定(dìng)位偶然出錯(cuò)而停止(zhǐ)。
2、機械手(shǒu)取料
當工件輸送到位,自動上下料機械手負責將輸送線(xiàn)上(shàng)的待加工工件送到機床內,將加(jiā)工完的工件從機床內取出,放回最初上料位置。其動作有:爪開合;升降運動(dòng);左右移動。其中手爪開合為汽缸驅動,升降運動、左右移動分別由伺服電機驅動(dòng)。在抓工件過程中,必須保證手(shǒu)爪和工件之間的位置和角(jiǎo)度(dù)關係。首先調整手爪(zhǎo)上(shàng)的基準麵和台麵上相應的基準麵貼合,以減小角度誤(wù)差(chà);隨後平移手爪或料台,調整位置誤差。
3、卡盤上下料(liào)
桁架機械手的卡盤上下(xià)料這(zhè)是整個
自動上下料機械手機構(gòu)的核(hé)心部分。在卡盤上下(xià)料(liào)過程中,機械手應和機床一些輔助功能配合工作,要求同步協調、穩妥可靠。上、下料道和儲料裝置與工作主機的相(xiàng)對位(wèi)置,決定了工(gōng)件在上料前和下料後在空間所(suǒ)處的位置和姿勢(shì),這直接影響手臂的坐標形式。
4、機械手送料
卡(kǎ)盤上下料(liào)完(wán)成,桁(héng)架式機械手須把(bǎ)已加工好的工件(jiàn)運送到送料槽,此時,送料優先於取料和卡盤上下料(liào),取料優先於卡盤上下料,這樣才能(néng)保證在整個上下料循環(huán)過程中不會發生有料的抓手再去抓料。